City as a Serviceを支えるデジタルツインを持続可能な状態で自己成長させるエコシステム
~情報指向型ネットワークを利用した高信頼データキャッシュ技術の開発~
目 次
- Ⅰ. 要 旨
- Ⅱ. はじめに
- Ⅲ. 研究開発項目
- Ⅲ.A. 概 要
- Ⅲ.B. 年度別研究計画
- Ⅲ.C. 研究開発項目2-d-ⅰ)ICWSN実装・開発・評価(地上ノード)(㋿4年度)
- Ⅲ.D. 研究開発項目2-d-ⅱ)ICWSN実装・開発・評価(地対空ネットワーク構築)(㋿5年度)
- Ⅲ.E. 研究開発項目2-d-ⅲ)ICWSNの信頼性向上のための要素技術の確立(㋿5年度)
- Ⅲ.F. 研究開発項目2-d-ⅳ)地対空統合ICWSNの横断的実証評価(㋿6年度)
- Ⅲ.G. 研究開発項目2-d-ⅴ)ICWSNの高信頼化に関する実証評価(㋿6年度)
- Ⅲ.H. 研究開発項目3-b-①-ⅰ)プロトタイプ:3Dセンサシステム(基礎設計)(㋿4年度)
- Ⅲ.I. 研究開発項目3-b-①-ⅱ)プロトタイプ:3Dセンサシステム(テスト運用)(㋿5年度)
- Ⅲ.J. 研究開発項目3-b-①-ⅲ)プロトタイプ:3Dセンサシステム(横展開を含めた実証実験)(㋿6年度)
- Ⅳ. 高信頼ICWSN研究開発の成果
- Ⅳ.A. 研究開発項目2-d-ⅰ)ICWSN実装・開発・評価(地上ノード)(㋿4年度)
- Ⅳ.B. 研究開発項目2-d-ⅱ)ICWSNテストベッド実装開発・評価(地対空ネットワーク構築)(㋿5年度)
- Ⅳ.C. 研究開発項目2-d-ⅲ)ICWSNの信頼性向上のための要素技術の確立(㋿5年度)
- Ⅳ.D. 研究開発項目2-d-ⅳ)地対空統合ICWSNの横断的実証評価(㋿6年度)
- Ⅳ.E. 研究開発項目2-d-ⅴ)ICWSNの高信頼化に関する実証評価(㋿6年度)
- Ⅳ.F. 研究開発項目3-b-①-ⅰ)プロトタイプ:3Dセンサシステム(基礎設計)(㋿4年度)
- Ⅳ.G. 研究開発項目3-b-①-ⅱ)プロトタイプ:3Dセンサシステム(テスト運用)(㋿5年度)
- Ⅳ.H. 研究開発項目3-b-①-ⅲ)プロトタイプ:3Dセンサシステム(横展開を含めた実証実験)(㋿6年度)
- Ⅴ. おわりに
- 謝 辞
- 研究成果
Ⅰ. 要 旨
(クリック拡大)
以下より、実施計画書にて掲げていた目標について達成した。
[目 標]
- ブロックチェーンを使ったICNのデータキャッシュ技術の開発
- 空中に存在するノードを含めたICWSN構築および実証開発
- 情報指向無線センサネットワークの高信頼性データキャッシュ技術開発
- スマートシティに実展開した場合に想定される現実的な課題解決
[目標に対する達成事項]
- ブロックチェーンを使ったICNのデータキャッシュ技術の開発
- 情報指向無線センサネットワークのテストベッド実装開発している。
- 情報指向無線センサネットワークのデータ収集の信頼性向上のための要素技術を確立し、ハードウェア装置を用いた現実的な環境下で評価している。
- 地上に構築したICWSNに相互接続させるかたちにて、空中に存在するIoT機器を含めたネットワークを構築している。
- スマートシティに実展開した場合に、ペーパーワークでは知ることができない現実的な問題の洗い出しを行い、その解決に向けた実証を行っている。
- 高信頼ゼロタッチセンサノードの実装開発およびKOIL Mobility Fieldおよび福岡大学近郊エリアの2カ所にて運用を行い提案手法の実験的な有効性評価を行っている。
Ⅰ. はじめに


情報指向ネットワーク(information-centric networking; ICN)を無線通信システムに導入する多くの研究では、コンテンツデータをユーザに効率的に提供することに主眼が置かれている。すなわち、コンテンツサーバのデータを基地局にキャッシュしてゆき、ユーザに効率的にデータを配信する手法が中心的な存在である。一方、次世代無線通信システム(beyond fifth generation; B5G)において今後のIoT(Internet of things)システムを支える情報指向無線センサネットワーク(information-centric wireless sensor network; ICWSN)では、無線センサネットワーク(wirelesse sensor network; WSN)から基地局に向けたアップリンクについても考慮する必要があるため、そのプロトコル設計には検討の余地がある。また、ICWSNに関する他の研究開発においては、計算機シミュレーションによる検討・評価が多く、実々装したハードウェア装置を用いた現実的な環境やシナリオ下での評価の意義は大きい。そこで、本研究開発における共同提案者として分担する研究開発項目においては、ICWSNを利用したデータ収集の信頼性向上のための要素技術の確立を行い、プロトタイプ実装とフィールド実証に挑戦する。
通信ネットワークを高信頼化するためには、それを構成するノードに故障が生じてもサービスに支障が出ないように設計することである。5G/B5Gにおいてはネットワークスライシング技術により、複数のアプリケーションのユースケースをサポートできるようにしており、そのなかでも多数接続無線ノードによる多量データの交換を高信頼に行うためには、新たな無線ネットワーク技術の開発が必要不可欠である。5Gの無線伝送区間を対象としたURLLC(ultra-reliable and low latency communications)ではファイブナイン(99.999%以上)のパケット到達率を達成しようとしているが、ここで想定する高信頼データキャッシュ技術とは、センシングデータがその内容に関して意味をなす有効期間中、情報取得者からの要求に対し応答可能であることと考えている。
しかしWSNを構成する無線ノードは、バッテリーの制約、乏しい演算能力を備えたハードウェアであり、その無線通信環境は有線ネットワークと比較して劣悪であるため、有線系で培われてきたこれまでのICN技術では十分に機能するという前提は成立しない。すなわち、通信ネットワークのトポロジーとして連結性が確保されていても通信できない場合があり、通信可能であったとしても通信環境によってリンクが瞬断される場合は通信サービスに支障が生じることもある。また、高信頼データキャッシュ技術の別の側面として、セキュアであることも必要な要素である。無線通信においてセキュアにデータ伝送を行う場合、送受信器間でセキュアな無線リンクを構築し、そのうえをデータ伝送することが一般的である。この点については、WSNにICNを導入することにより、無線通信路を保護するのではなくデータを直接保護できるようになる。そのため、セキュアな無線リンクを構築するための処理、および無線リンクが不安定な場合における再構築処理に関するオーバーヘッドを削減することができる利点がある。また、プライバシーセンシティブなデータについても、他のデータと同じ無線通信路を通じて伝送できるようになるため、セキュアな無線リンクを実現する機構を省略できる利点もある。
これらICNの利点を活かしつつ、無線ノードの離脱・追加、移動、伝搬環境の変化による動的な無線ネットワーク環境に対し、周辺ノードが相互に補完することによる高信頼ICWSNの要素技術を考案する。具体的には、これまで研究開発をすすめてきたブロックチェーンを用いたセキュアキャッシング手法や、一部のフレームが受信機に到着しない場合でも消去符号を用いることでデータを復元できる手法を取り入れることを検討する。さらに、ブロックチェーンにおいては、すでに投票方式に基づく合意形成方式を採用した新たなブロックチェーンの検討をすすめている(図1)。この方式では、歩行者、小型自動車、UAV(unmanned aerial vehicle)などの移動体が、データ収集者だけでなく検証者としての役割も担い、コミットされたブロックの検証は、参加者自身による投票に基づいて承認する点に特徴がある。そのため、他のブロックチェーン(ビットコイン、イーサリアム等)とは異なり、PoW(proof-of-work)による大量の計算を行うことなくブロックの検証を実現できるので、ICWSNを構成するデバイスに課せられたハードウェアの制約に対し有効であると考えている。このように、これまで検討してきた手法を組み合わせた高信頼なデータキャッシュ技術を考案する。
また、本研究開発項目においては、ICNおよびブロックチェーン技術を活用したWSNにおけるデータ収集の高信頼化が目的である。これまでの研究開発を通じて、世界にも先駆けて、ICNおよびブロックチェーンの高度な融合および、ICWSNとして昇華させてきた。一方で、本研究開発においては、ICNを専門にしている早稲田大学やブロックチェーン(およびそのビジネス展開)を専門にしている株式会社ガイアックスが参画しており、さらなるICWSNの発展および社会展開が期待できる。それに加えて、海外連携パートナーであるイタリアのAndrea Detti教授も長年、ICNを研究開発している。そのため、Andrea Detti教授とも連携し、ICWSNの技術を高めていくとともに、本分野の国際競争力の強化のために標準化提案も行っていく(標準化提案は早稲田大学が中心に行う)。
また、テストベッド開発においては、産業用の組込みコンピュータとして実績のあるアドバンテック株式会社のMIC-710AIXとLTE回線を利用した、ICNの無線通信実験環境を構築しており、評価実験を継続実施している。本試作機は、各種エアインタフェースを拡張することができるため、ここでのフィールド実験で利用するミリ波他、サブギガヘルツ波、マイクロ波への対応も可能である。このように、実フィールドで検証するために接続性や機器のカスタマイズなどの最終調整は必要であるが、実環境で評価することを前提としたプロトタイプは準備できており、実験室での運用検証を進めている状況である(図2)。
Ⅲ. 研究開発項目
研究開発プロジェクトの中で分担した、研究開発項目2-d)および研究開発項目3-b-①)におけるICWSNのデータキャッシュ機能を利用した高信頼化に関して述べる。その際、ブロックチェーン技術の適用を検討し、ここで確立した技術に関しては積極的に標準化を進める。
Ⅲ.A. 概 要
研究開発項目2-d)および研究開発項目3-b-①)では、B5Gに具備すべき「信頼性」に資する要素技術の確立を行う。参加型センシングにおける攻撃者の存在を見越して、ネットワーク上を流れるセンシングデータ、悪意のある毒データ、AI(artificial intelligence)モデルへの攻撃といった攻撃への対処として、データの信頼性を保証するブロックチェーンネットワークシステムの設計を行う。とくに、ICWSNを利用した高信頼データキャッシュ技術を考案する。
研究開発項目2-d)および研究開発項目3-b-①)において、プロトタイプ実装のフィールド実証の場として、KOIL Mobility Field(千葉県柏市)を活用する。とくに通信インフラとして、LPWA(low power wide area)、Wi-Fi、Terragraphが提供するミリ波メッシュネットワークがKOIL Mobility Field内で利用可能となっている。KOIL Mobility Fieldでは、カメラ映像をはじめ、気温・湿度・騒音・日照量などの情報をすでに取得している。一方で、未来都市におけるCity as a Serviceに必要不可欠な3Dセンシングデータや上空の気象情報(例えば、風力や風向)の収集、また、それらのデータ流通やデジタルツインとしてのモデル化までは行っていない。そこで、将来的に柏の葉スマートシティ内でシームレスに最新の都市のデジタルデータ(都市活動データなど)を共有、流通させることを目的に、本研究開発期間内は、KOIL Mobility Fieldがすでに有する通信機器を有効活用しながら、エコシステムの有効性検証を実施する。
Ⅲ.B. 年度別研究計画
㋿4年度は、各研究開発項目を、それぞれの要素技術の基本方式を設計・試作していく。とくに、㋿5–6年度のフィールド実証に向けて、必要な機材の購入や単体動作試験などの基礎的な実験を行う。
㋿5年度は、㋿4年度に試作・検討した方式を、研究室内に閉じた実験環境を利用して、その有効性の評価を完了する。さらに得られた評価結果から、令和6年度のフィールド実証に向けて、必要となる各研究開発項目の個別技術の方式改良を検討する。また、各研究開発項目において、設計した基本方式については、3Dセンサシステムやスマートポールのプロトタイピングへと実装を行っていき、KOIL Mobility Fieldにおいて、基本特性の評価実験を実施する。それによって得られた結果を各研究開発項目へとフィードバックし、不足している機能要件を洗い出し、方式の改良へと利用する。このとき、プロトタイピングを遅延なく進捗させ、それぞれ得られた評価結果や知見を活かし、㋿5年度内のプロトタイプ実装の完了を確実なものにする。
㋿6年度は、本アウトプット目標であるCity as a Serviceを支えるデジタルツインを持続可能な状態で自己成長させるエコシステムを実現するため、㋿5年度に開発したそれぞれのセンサシステムに対する各機能の更新および拡張、さらには機能の統合を行っていく。最終的に、スマートセンサシステムを実装し、KOIL Mobility Fieldにおいてフィールド実証を行う。本フィールド実証を通して、スマートセンサシステムの電源を入れるだけで、各デバイス間を接続するIoTネットワークの形成とデータ流通が働き、デジタルツインの形成が行われていくことを明らかにする。
Ⅲ.C. 研究開発項目2-d-ⅰ)ICWSN実装・開発・評価(地上ノード)(㋿4年度)
研究開発項目2-d-ⅰ)では、ICWSNにおいて、高信頼性データキャッシュ技術の開発を行う。これまでの検討事項は、基本的にIoT機器はエンド端末であるという想定があった。これに対して、今後、地上および空中に存在するIoT機器それぞれが、アドホックなWSNを自動的に形成し、自己成長していくことも考えられる。そこで、ここでは、ICNおよびそのキャッシュ機能を利用した高信頼なWSNの実現に挑戦する。
Ⅲ.D. 研究開発項目2-d-ⅱ)ICWSN実装・開発・評価(地対空ネットワーク構築)(㋿5年度)
研究開発項目2-d-ⅰ)において実現した地上配備デバイスに相互接続させるかたちにて、空中に存在するIoT機器を含めたICWSN構築実験テストベッドを実装開発し評価する。また、信頼性の高いWSNの構築および評価のために必要なノードとして、長期安定動作可能なデバイスを実装開発する。評価はKOIL Mobility Fieldおよび福岡大学近郊エリアの2カ所にて運用を行い、ICWSNにおける高信頼なWSNを実現する。
Ⅲ.E. 研究開発項目2-d-ⅲ)ICWSNの信頼性向上のための要素技術の確立(㋿5年度)
ICNを無線通信システムに導入する多くの研究では、コンテンツデータをユーザに効率的に提供することに主眼が置かれている。すなわち、コンテンツサーバのデータを基地局にキャッシュしてゆき、ユーザに効率的にデータを配信する手法が中心的な存在である。一方、B5Gにおいて今後のIoTシステムを支えるICWSNでは、無線センサネットワークから基地局に向けたアップリンクについても考慮する必要があるため、そのプロトコル設計には検討の余地がある。また、ICWSNに関する他の研究開発においては、計算機シミュレーションによる検討・評価が多く、実々装したハードウェア装置を用いた現実的な環境やシナリオ下での評価の意義は大きい。そこで、本研究開発項目では、ICWSNを利用したデータ収集の信頼性向上のための要素技術の確立を行う。通信ネットワークを高信頼化するためには、それを構成するノードに故障が生じてもサービスに支障が出ないように設計することであり、本項目において想定する高信頼データキャッシュ技術とは、センシングデータがその内容に関して意味をなす有効期間中、情報取得者からの要求に対し応答可能であることと考えている。
Ⅲ.F. 研究開発項目2-d-ⅳ)地対空統合ICWSNの横断的実証評価(㋿6年度)
次世代無線通信システムを支える高周波スペクトラムの開拓は急務であり、本研究開発で用いているミリ波帯通信(mmWaves)を使用したTerragraphはその一端を担っている。研究開発項目2-d-ⅱ)において、空中中継ノードを用いた地対空統合ICWSNの基礎特性評価を実施し、ミリ波通信の電波伝搬計測および長期運用テストに向けた基礎評価を実施した。ここでは、㋿5年度に実施した上記のテスト運用を継続的な長期運用テストとして継承し、それを通じて、天候(降雨・積雪)や周辺環境が無線通信システムに与える影響について検証する。これは、スマートシティに実展開した場合に想定される、排除できない現実的な影響に関して、ペーパーワークでは知ることができない問題として洗い出しを行い、その解決に向けた検討を実施することになる。ここでの検証結果は、システムの高信頼化を図ることに活かすことができると考えている。
また、開発ICWSNシステムの横断的展開を見据え、複数の上空ノードにおける特性評価など、様々な通信環境を想定した特性評価を実施する。これは、他の共同提案者と連携した実験を実施し、複数の上空ノードにおける特性評価など、上空ノードの想定環境を多角的な視点で開発ICWSNシステムの検証を実施する。それらの成果は、本研究開発の後続研究に対し有意な知見とノウハウを提供可能とする。
Ⅲ.G. 研究開発項目2-d-ⅴ)ICWSNの高信頼化に関する実証評価(㋿6年度)
B5Gにおいて、今後のIoTシステムを支えるICWSNでは、WSNから基地局に向けたアップリンクについても考慮する必要があるため、そのプロトコル設計には検討の余地がある。また、ICWSNに関する他の研究開発においては、計算機シミュレーションによる検討・評価が多く、実々装したハードウェア装置を用いた現実的な環境やシナリオ下での評価の意義は大きい。そこで、ここでは、研究開発項目研究開発項目2-d-ⅲ)で確立させた要素技術に対し、研究開発項目2-d-ⅰ)で行ったテストベッド開発のノウハウを活かし、高信頼ゼロタッチセンサノードの実装開発、ならびにKOIL Mobility Fieldおよび福岡大学近郊エリアの2カ所にて運用を行い提案手法の実験的な有効性評価を行う。
Ⅲ.H. 研究開発項目3-b-①-ⅰ)プロトタイプ:3Dセンサシステム(基礎設計)(㋿4年度)
ここでは、これまで実装開発をすすめてきた試作機を用いて、実フィールドでの実証実験に先立ち、可搬タイプノードの実装開発を行う。主として研究室ベースでの長期運用テスト、当該ノードに具備するセンサや無線モジュールの疎通テストを実施する。また、実フィールドにおいてプロトタイプネットワークを構築のうえテスト運用実施する。これにより、次年度以降に予定している、研究開発項目2-d)の研究成果を導入したテストベッドを用いた実験評価に先立つ課題の洗い出し、仕様変更を含めた試作機のテスト運用に向けた検討を実施する。
Ⅲ.I. 研究開発項目3-b-①-ⅱ)プロトタイプ:3Dセンサシステム(テスト運用)(㋿5年度)
実フィールドにおいてプロトタイプネットワークを構築のうえテスト運用実施する。併せて研究開発項目2-d)を導入したテストベッドを用いた実験評価に先立つ課題の洗い出し、仕様変更を含めた試作機のテスト運用に向けた検討を実施する。研究開発項目2-d-ⅱ)と連携し、テスト運用はKOIL Mobility Fieldだけではなく、福岡大学近郊地においてその一部の機能を再現させることにより、多面的な運用評価ができるようにする。
Ⅲ.J. 研究開発項目3-b-①-ⅲ)プロトタイプ:3Dセンサシステム(横展開を含めた実証実験)(㋿6年度)
研究開発項目3-b-①-ⅱ)で完了したテスト運用結果を踏襲し、研究開発項目2-d-ⅳ)およびⅴ)と連携し、研究開発項目2-d-ⅲ)で行った基礎設計をふまえた実証評価を行う。実証評価には他機関との連携や横展開を見据えた実証評価も含めることを考えている。本項目の検証を踏まえて、開発ICWSNシステムがスマートシティに実際に展開する場合に、ユーザに対してどのようなソリューションを提供可能であるかという点に関しても考慮する。本検討開発をすすめるなかで、実際の都市を実験フィールドとして実証・評価を行うことは、開発ICWSNシステムの横展開を進めるうえで有意義である。そこで、開発システムのテスト運用のための実証フィールドの提供を福岡県直方市に協力してもらい検証をすすめる。
Ⅳ. 高信頼ICWSN研究開発の成果





















Ⅳ.A. 研究開発項目2-d-ⅰ)ICWSN実装・開発・評価(地上ノード)(㋿4年度)
本研究開発項目では、B5Gに具備すべき「信頼性」に資する要素技術の確立に挑戦する。具体的には、参加者の参加、離脱が高頻度に起こることを想定し、ICWSNを対象とした高信頼データキャッシュ技術について検討する。とくに、WSNでは、有線ネットワークと比較して、バッテリーや演算能力などのハードウェアに大きな制約がある。そのような制約下においても、高信頼なデータキャッシュを可能とする。これまでの検討事項は、基本的にIoT機器はエンド端末であるという想定があった。また、今後、地上および空中に存在するIoT機器それぞれが、アドホックな無線センサネットワークを自動的に形成し、自己成長していくことも考えられる。ここでは、ICWSN実証実験に必要なテストベッドデバイスとして、地上配備型、可搬タイプノードの実装開発および基礎評価を実施する。
地上配備デバイスに相互接続させるかたちにて、高信頼性ICWSN構築および評価のために必要となるデバイスを開発した。KOIL Mobility Fieldにおいて実証実験を行うために必要となる可搬型・機能拡張カスタマイズを実施した。まず試作機を実装し、基礎評価を通じて現地での展開を見据えた実々装に係る課題を洗い出した。当該試作機においては、搭載コンピュータをMIC-710AIXの上位互換機材であるAIR-020Xに置き換え、エアインタフェースとしてTerragraphに対応させた。
ここでの研究開発を通じて、現デバイスは陸上では利用可能であるが、上空への展開を考えるとき、重量・大きさ等の観点において必要スペックを満たせないことが明らかになった。そこで、ドローンへの搭載実績および画像解析に実績があるアドバンテック株式会社のBrain Unit for Drone(BUD)をベースとした代替デバイスとして、本実証実験で利用可能にするためのカスタマイズを施したテストデバイスを開発した。とくに、リチウムイオンバッテリーから独利した電源で動作可能としている。
Ⅳ.B. 研究開発項目2-d-ⅱ)ICWSNテストベッド実装開発・評価(地対空ネットワーク構築)(㋿5年度)
研究開発項目2-d-ⅰ)において、ICWSN実証実験に必要なテストベッドデバイスとして、地上配備型、可搬タイプノードのハードウェア装置を実装開発した。しかし、今後、地上および空中に存在するIoT機器それぞれが、アドホックな無線センサネットワークを自動的に形成し、自己成長していくことも考えられる。そこで、研究開発項目2-d-ⅰ)において実現した地上配備デバイスに接続させるかたちにて、地対空ICWSN構築および評価のために必要となる、ノード開発およびテストフィールドを構築した。テストフィールドは、KOIL Mobility Fieldおよび福岡大学近郊エリア(アドバンテック株式会社直方事業所の野球場(福岡県直方市)を選定)の2カ所に構築し、運用を含めた実証実験の準備を整えた行った。
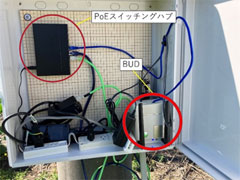
KOIL Mobility Fieldに設置した機材の概観を図5–6に示す。電源はKOIL Mobility Fieldに敷設されている商用電源を制御ボックスに引き込むことで確保した。インターネットへのアクセス回線については、バックアップを含めて2回線とし、主回線はKOIL Mobility Field内のTerragraphおよび光ネットワークを介したもの、副回線は4G/LTEルータを介したセルラネットワークである。大容量センシングデータの無線伝送実験のために4Kカメラを配置し、4KカメラとTerragraphはPoE(power over Ethernet)スイッチングハブから、LANケーブルを介して信号と電力を供給している。制御コンピュータとして、研究開発項目2-d-ⅰ)において開発したBUDデバイス(2コア1.8GHz Intel Atom CPU、Ubuntu 20.04、拡張処理モジュールおよび通信モジュール)を改造した上空ノードデバイスを設置した。当該BUDデバイスは陸上・上空においてともに使用することを想定した産業用デバイスであり、本研究開発のために、現地設置ノードデバイスとしてカスタマイズを施しローカルコンピュータとして設置した。また、外部からのリモートアクセスを実現するために、仮想デスクトップアプリケーション(AnyDesk)を設定した。
一方、野球場に敷設したテストフィールドには、KOIL Mobility Fieldのネットワークの一部を切り抜いた構成として同様の機材を設置した。これにより、福岡大学において研究開発したシステムを速やかに実装し実証実験フェーズに昇華させることを可能としている。設置した機材の全体の概観を図7-11に示す。Terragraphの子機(MLTG-CN)はKOIL Mobility Fieldに設置した設備と同等のものを設置した。一方、親機(MLTG-360)はKOIL Mobility Fieldが提供するTerragraphネットワーク部分について、その部分構成として構築した。この親機については、ICWSNの各種無線通信実験に必要なベースステーションの役割も併せ持っている点を補足する。
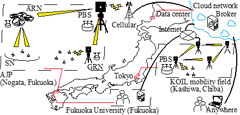
ここで構築しているテストフィールドは、提案ICWSNフレームワークの構成要素として、広域に分散したICWSNを統合的に管理することを可能とする設計を目指している。図12に示すように、テストフィールドとして、KOIL Mobility Field(千葉県柏市)、アドバンテック株式会社直方事業所の野球場(福岡県直方市)、福岡大学(福岡県福岡市)に機材を設置したうえで、これらのフィールドはさくらインターネットが提供するクラウドサーバに配置したブローカを介して相互接続され、VPN(virtual private network)接続により論理的に同一セグメントに配置した。これにより、広域に分散したICWSNを統一的に管理することを可能としている。
個々のテストフィールドを構成するICWSNは、センサノード(sensor node; SN)、中継ノード(relay node; RN)、自営基地局(private base station; PBS)から構成され、さらにRNは陸上配備(ground relay node; GRN)および上空配置(aerial relay node; ARN)としている。これらの主要なノードをフィールドに展開し、実証実験が可能な環境を構築している。また、エンドユーザー(データ消費者)は、ICWSNに参加することで直接データを取得することができると想定のうえ、データ取得のネットワークプラットフォームとして、ccnxベースの通信を可能にするCeforeを使用して実現している。
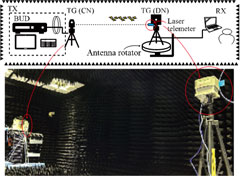
提案ICWSNは地対空統合型ネットワークを目指しており、空中に存在するIoT機器を含めたICWSN構築実験テストベッドを実装開発し評価する必要がある。そこで、スマートシティを実現させるためのアプリケーションサービスを支えるために、WSNは要素技術のひとつとして重要な位置づけにある点に焦点をあて、無線ネットワークは電波伝搬による信号減衰や無線通信環境の変化によるフェージングなど、有線ネットワークと比べて厳しい通信環境であることを考慮して設計した。具体的には、ここで構築するICWSNに必要不可欠な要素技術として、基礎的なミリ波伝搬特性を検証について、NICT所有YRP内の電波暗室(横須賀市)において実施した。この評価の目的は、送信機(TX)と受信機(RX)が、物理的に不安定な動きをする場合(特にUAVの挙動によるARN)の通信品質を、Terragraphビームフォーミング技術と光に似た伝搬をするミリ波に関して検証することにある。
ミリ波帯Terragraphにおける通信システムのハードウェア機材として、ミリ波メッシュネットワークを構成する親機(MLTG-360)と子機(MLTG-CN)を用いた。カタログ仕様によると、等価等方放射電力(equivalent isotropic radiation power; EIRP)は、親機ノードが43dBm、子機ノードが38dBmである。無線リンク上に見通しが十分に確保されている場合、親機と子機間の通信可能距離は300mである。親機および子機のTerragraphノードに具備されたアンテナは、64素子のフェーズドアレイで構成され、アンテナ利得は、各々、28dBiおよび22dBi、ビームフォーミングの許容角度は、水平面(方位角)(φ)が±45°、垂直面(仰角)(θ)が±25°である。Terragraph機材のアンテナのビームフォーミングに関しては、事前に設定されたアンテナビームの方位を表すインデックスパターンから、電源投入時またはリンク切断時に自動設定される。また、Terragraph通信に割り当てられた60GHz帯の周波数として、4チャンネル(中心周波数:58.32、60.48、62.64、64.80GHz、帯域幅:2.16GHz)が利用可能である。
実験は実験機材を図13に示すように配置・構築した。実験手順としては、親機と子機の各ノードを6.9m離して配置し、初期位置として対向させた(すなわち、水平面と電波の方向を調整した)。ネットワーク特性とアプリケーション特性として、iPerf3とCeforeを用いてTCPとICNレイヤのスループットを測定した。実験結果として、3回測定した平均値を図14に示す。また、親機と子機のTerragraph機材の空中線電力については、管理画面から知ることができるステータス情報から、EIRP(送信電力、アンテナ利得、給電減衰を考慮した送信信号強度)とRX側のRSSI(受信信号強度)から取得した。TCPのスループットはどの角度でも安定しており、ICNのスループットは60°または5°の領域で安定していた。Terragraphの仕様上、アンテナビームは水平方向より垂直方向の方が狭いことに注意する必要があるが、ARNとGRNとして使用する場合、多少のモビリティを許容できることが分かった。
Ⅳ.C. 研究開発項目2-d-ⅲ)ICWSNの信頼性向上のための要素技術の確立(㋿5年度)
ここでは、ICWSNを利用したデータ収集の信頼性向上のための要素技術の確立を行う。高信頼データキャッシュ技術の基礎設計に関して、自己成長につながるゼロタッチ技術として、デバイスをICWSNに参加させる際の心理的ハードルを解決することにより、自己成長を阻害する要因を取り除くことに焦点を当て検討した。その結果、自己成長を阻害する要因の一つを取り除くことにより、それを促すことに貢献できると考えている。具体的には、SNがICWSNに参加する際に必要な初期動作に関し、下位レイヤに焦点を当てたゼロタッチ機能の提案を試みている。とくに、B5Gにおける無線ネットワーク・通信システムにおいては、自由なノードの参加・離脱に伴う単純なスケールアップではなく、多様な背景や動機を持つユーザが、多様なデバイスを、多様なネットワークを介して接続される。そのため、高信頼化を実現するためには、SNが生成するデータをクリーンに保つ(悪意のあるデータの混入や悪意がない場合であっても機器の不良・故障による誤データの混入を含めて)ために、初期登録プロトコルを慎重に検討する必要がある。上述した点を考慮し、その第一ステップとして、ICWSNにSNを参加登録させる際の参加ノードの信頼性を確保する点について検討している。ICWSNに対する設計の方針や関連研究等の研究調査、ならびに本研究開発を通じて提案する技術課題に関して俯瞰し、その展望を青写真として示した。
ここで確立を試みた要素技術は、研究開発項目2-d-ⅰ)およびⅱ)において構築したICWSNフレームワークに対し、ICWSNを利用したデータ収集の信頼性向上を目指す。研究開発項目2-d-ⅲ)の目標を達成するための基礎検討として、実際のスマートシティアプリケーションサービスが展開されるゼロタッチ設計のICWSNのシステムとして設計した。ここでの高信頼化とはシステムが一定の時間間隔を通じて正しく動作することを示すベンチマーク、すなわち起こりうるあらゆるエラーに耐えられる(フォールトトレラント)信頼性の高いシステムであると解釈する。システムが正しく動作し、いつでもその機能を実行し続けることができることを示す指標として、アベイラビリティを採用し、高信頼なシステムはアクセスできない期間がないと解釈する。
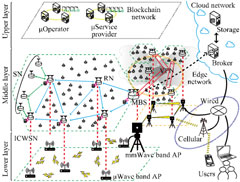
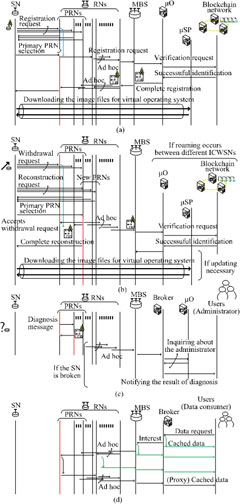
図15–16に示す通り、高信頼システムを実現するために、提案手法ではマイクロオペレータ(micro operator; μO)と呼ぶ仕組みを利用する。μOが電源投入時に個々の情報を検証した場合にのみ、ネットワークノードに参加できる仕組みを考える。これにより、実際のスマートシティにシステムを導入する場合、初期化に必要な労力を軽減するために、まずICWSNによる自動参加を可能にする必要がある。このため、ゼロタッチ設計のために、μOがその業務を行うことでデバイス情報を管理できるようにする。μOが管理する情報は、ICWSNとブロックチェーンの両方が相互信頼のない自律分散型ネットワーク下で連携できるため、提案方式ではブロックチェーンベースの台帳を利用する。このとき、ICWSNでは、ネットワークノードは一般的にリソースに制限があるため、ブロックチェーンネットワークをサポートすることは実現不可能である。そのため、μOを採用することにより、提案手法が初期プロセスにおいてノードの信頼性を保証するという点で解決策を提供する。提案手法を採用することにより、データの信頼性として、信頼できるノードが生成したデータは、追加の検証を受ける必要なく信頼できる。このため、ブロックチェーンを利用したデータ保存では、従来のような計算集約的なマイニングは不要となり、ブロックチェーンは従来のコンセンサス手法ではなく、代替のコンセンサス手法(例えば、proof-of-authority(PoA)やproof-of-elapsed-time(PoET)のアルゴリズム)を選択するだけでよい利点も得られる。
アベイラビリティを改善するためには、提案手法はプロキシ・キャッシング手法を採用することで解決を図る。これは、センシングデータに応答する役割を比較的信頼性の低いノード(例えば、SN)からより信頼性の高いノード(例えば、RNまたはPBS)に移し、協力的なデータ管理により信頼性向上に寄与できるものである。以上の研究を基礎として、信頼性と可用性に焦点を当ててICWSNシステムを進化・拡張させた手法として検討した。また、提案手法が他の社会問題(カーボンニュートラルなどの都市のグリーン化)を解決しうる要素技術になり得る可能性を秘めているため、それに関しても継続して検討する必要性もある。
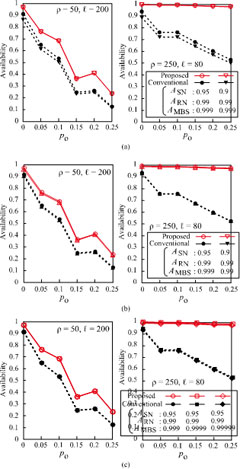
数値例として、図17(a)SNがRNおよびPBSよりも信頼性が低い、(b)PBSとRNが同等の信頼性を持つ、(c)PBSがSNおよびRNよりも信頼性が高い条件を想定して評価した。提案手法においては、プロキシ・キャッシング手法を採用することにより、信頼性の低いノードの代わりに信頼性の高いノードを使用することにより、全体的なアベイラビリティを改善することが可能であることが示されている。比較対象として、従来巣手法にでは代理キャッシュ技術を使用しておらず、また、PBSはICWSNシステムにおける単一障害点である点を補足する。数値例より、提案手法はアベイラビリティを改善していることが示されているが、高信頼性ハードウェアデバイスを開発するなど、多大なコストを支払い、PBSを過剰に信頼性高くしても、全体的な信頼性が大幅に改善されないことを示している。
Ⅳ.D. 研究開発項目2-d-ⅳ)地対空統合ICWSNの横断的実証評価(㋿6年度)
次世代無線通信システムを支える高周波スペクトラムの開拓は急務であり、本研究開発で用いているミリ波帯の通信(本研究開発ではTerragraphを使用)はその一端を担っている。研究開発項目2-d-ⅱ)において、空中中継ノードを用いた地対空統合ICWSNの基礎特性評価を実施し、ミリ波通信の電波伝搬計測および長期運用テストに向けた基礎評価を実施した。ここでは、研究開発項目2-d-ⅱ)で実施したテスト運用を継続的な長期運用テストとして継承し、それを通じて、天候(降雨・積雪)や周辺環境が無線通信システムに与える影響について検証する。これは、スマートシティに実展開した場合に想定される排除できない現実的な影響に関して、ペーパーワークでは知ることができない問題として洗い出しを行い、その解決に向けた検討を実施することになる。現在継続中のテスト運用を継承し、天候の影響や周辺環境が電波伝搬に与える影響評価も含め開発ICWSNシステムの高信頼化を図る。また、開発システムの横断的展開を見据え、地対空ICWSNの適用可能性を多角的な視点で評価する。ICWSNシステムの横断的展開を見据え、複数の上空ノードにおける特性評価など、様々な通信環境を想定した特性評価の実施については、研究開発項目3-b-①-ⅲ)において述べる。
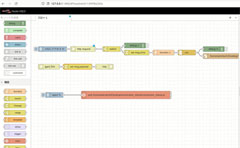
研究開発項目2-d-ⅱ)で構築したテストフィールドを利用して、陸上ノード間(PBS、GRN)実証実験を実施した。これは、実際の都市にICWSNシステムを展開する前段階として、長期的な運用テストを実施したものである。特性評価の指標として、ネットワーク特性はiPerf3を使用して、野球場に設置したPBSとGRN間の無線伝送リンク(ミリ波帯Terragraph)に対し、TCPスループット(ネットワーク帯域幅)を計測した。定期計測のために、Perlを使用した制御ソフトウェアを実装し、それをNode-REDを使用してユーザ・フレンドリなパネルと操作性により容易な再プログラミングと再構成を可能とする設計とした。これは、専門知識がなくても誰でも提案システムをインストールし、運用できるという方針によるものである(ゼロタッチ設計)。実験用ネットワークは、PBSとGRNに対し,P2P(point-to-point)接続にて、静的ローカルIPアドレスを事前に割り当て、同一サブネット上に配置した。
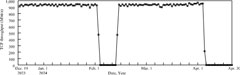
図20に実験結果を示す。スループット計測は、(毎)正時00分と30分に、30秒間隔で測定し、1,440(= 48×30)回の測定の平均値として、日々の平均TCPスループットとしてまとめた。実証実験は、㋿5年12月19日から㋿6年4月26日まで実施した。実験期間全体の平均スループットは940Mbit/sであり、Terragraphの理論上限である1Gbit/sに達した。ただし、IEEE 802.11ad/ayの仕様上は、物理層でのスループットは1.93–4.62Gbit/sまで規定されているが、実験に用いたミリ波TG通信機材の有線LANインタフェースがギガビットイーサネット準拠であるため、そこがボトルネックになっている点を補足する。また、ミリ波は、天候の影響を受けやすい特徴がある(雨天)。気象庁の降雨データによると、130日間の実験期間中、1日あたり1mm以上の雨が降った日は66日、とくに10mm以上は18日であった。さらに、最大降雨量は19.5mm/hr.、平均値は3.42mm/hr.であった。実験結果を検証した結果、今回の実験結果においては、先述した天候条件では、実験結果(ネットワーク特性)に対し、有意な影響を与えていないことが分かった。
実験期間中、㋿6年2月2日から2月13日(11日間)、および㋿6年4月6日から4月26日(24日間)の2回、計測データが取得できない事案が生じた。この原因としては、Terragraph通信によるものではなく、主として計測コンピュータのハードウェア・ソフトウェアに起因するものであった。このネットワークトラブルに対し、制御コンピュータの再起動だけで解決可能な軽微な障害と、担当技術者を派遣し原因究明と解消を図る必要がある深刻な障害に分類する場合、本事案については軽微な障害であった。このことから、提案システムの無線リンクと機器の定期的な診断機構を搭載させたうえで、複数のノードが協力して相互に監視し、障害発生時には自動的に再起動などによる自動復旧のメカニズムを搭載させることにより、システム全体の可用性が向上することが分かった。
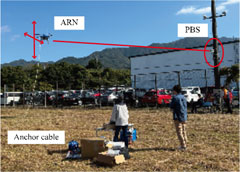
研究開発項目2-d-ⅱ)で構築したテストフィールドを利用して、地対空統合ICWSNシステムとしての実現性評価として、陸対空ノード間(PBS−ARN)実証実験を実施した。とくに、ARNデバイスを実装し、ミリ波通信をベースとした陸上局対上空局間の無線ネットワーク特性を検証した。ARNは、機材搭載(2–3kg)の都合により、産業用ドローンを使用して、UAV搭載を前提とした産業用コンピュータ(Advantech BUD)、カメラ、Terragraph子機で構成した。なお、UAVに搭載したコンピュータは、研究開発項目2-d-ⅰ)において検討した上空ノードである。カメラと子機は、各々、USBケーブルとイーサネット(LAN)ケーブルを介してコンピュータに接続した。ユーザ端末としては、PC(Intel Core i5U(2 core 1.3 GHz)CPU、8 GB RAM、Ubuntu 20.04 OS)をPBSに直接接続した。電波法および航空法の規制により、UAVは係留飛行とし、係留ロープには、Terragraph子機に対する電源供給PoEのLANケーブルを束ねた。UAV離陸後、ARNをPBSから = 10m離れた位置で、同じ高さとして = 5m でホバリング飛行させ、陸上PBS(Terragraph親機)と上空ARN(Terragraph子機)のアンテナ面を互いに正面に向かい合わせ、Terragraph子機ノードを再起動させることにより、ビームフォーミングの方向(インデックス)を固定した。現地の実験風景は図21に示している。
ネットワーク特性の評価として、TCPスループットはiPerf3を使用して30秒(1秒間隔)で計測した。ARNを = 10、20、30mの各位置でホバリング飛行させたとき、平均スループットは、735、787、899Mbit/sであった。なお、陸上でのTerragraph親機と子機の通信実験では、両ノードを d = 20m の距離で配置している。従って、陸上間通信と比較して、陸対空通信の平均TCPスループットは16.3%低下した。一般に無線通信の伝送品質は、送受信器間の距離に比例して低下する。しかし、今回の実験においては、 = 30mのスループットは = 10mまたは = 20mの測定結果と比較して安定した。具体的には、スループットの計測結果を統計的に処理した場合、 = 10、20、30mにおける標準偏差は、245、171、31.6 であった。この理由としては、UAVがホバリング状態を維持させた場合であっても、上下・左右、およびローリング・ピッチングの微少な動作に起因して、ミリ波無線伝搬特性に影響を与えたためである。そのため、PBSとARNの距離が長くなるにつれて、そのUAVの変動の影響が小さくなるため、直進性が強いミリ波通信の安定に貢献したと考える。とくにTerragraph通信機材は、陸上敷設の固定用無線メッシュワーク用途であるため、ビームフォーミングの再設定は動的(適応的)には実施されていない点、アンテナのビームパターンは固持されたまま適応変調の伝送レート(MCS(modulation and coding scheme)セット)のインデックスを下げ、適応電力制御(transmission power control; TPC)における送信電力を上げることにより、無線伝送リンクを維持させる設計となっている点を補足する。カタログ仕様上は、Terragraph親機と子機の通信距離は最大150mであるため、通信性能は十分であると考える。
UAVが上下左右に変動した場合のミリ波TG通信の安定性を検証するために、 = 30mの地点でホバリング飛行させた状態を基準とし、各々、1m移動させた場合のネットワーク特性を計測した。結果として、平均TCPスループットは、ホバリング状態、上下移動(垂直方向)、左右移動(水平方向)に対し、931、836、821Mbit/sであった。すなわち、TCPスループットは、ホバリング状態と比較して、最大460Mbit/s低下し、上下移動および左右移動では、10.2%、11.8%低下した。また、UAVの移動により、個々のスループット計測値(1秒間隔)の変動が大きくなり、その統計的な性質として、標準偏差は、ホバリング状態、上下移動、左右移動に対し、31.6、157、165であった。UAVの変動によりTCPスループットは一時的に低下したが、スループット上限に近い十分な通信速度および無線リンクは維持された。
TCPスループットは、BS–ARNおよびRN–SNの各々の無線区間で計測した。PBS–ARNの場合、UAVはPBSから10m、20m、30mの地点でホバリングさせた。一方、PBS–ARNでは、UAVはPBSから20m離れたSN上空でホバリングさせた。TCPスループットはiPerf3を用いて30秒間測定した結果をプロットしている。結果より平均TCPスループットは700–900Mbit/sであり、Terragraphのスループット上限である1Gbit/sに近接する、高速無線伝送を安定して行うことができた。しかし、PBS-ARNの結果では、PBS-ARN間の距離が短いほどスループットのばらつきが大きくなった。これは、UAVがホバリングしているとはいえ、上下左右に動き、さらにロールやピッチングもするため、その動作がミリ波の電波伝搬に影響を与えるためと考えている。そのため、PBSとARNの距離が長いほど、このような変位の影響は相対的に小さくなり、結果としてばらつきが小さくなったと考察した。
ICNスループットは、3つの異なるデータに対して、データ取得を5回実施し、その際に計測した値の平均値を表している。最初のデータ取得では、ARN経由でSNからデータを取得したため、ICNのスループットは低かった。一方、2回目から5回目までの平均スループットは、キャッシング機構により、初回と比較してスループットが改善した。ICNスループットは、異なるランダムデータ(3件)をcefputfileでICWSNにコミットし、cefgetfileでそれらを受信した際の時間に基づき、平均値として算出した。このとき、 = 10、20、30 mのとき、平均ICNスループットは、12.2、13.0、14.6Mbit/s、平均ジッタは、712、669、583μsであった。ICNスループットとTCPスループットの特性は同じ傾向を示した。
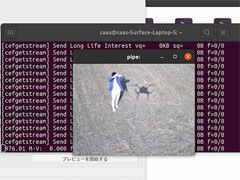
災害時情報共有システムのようなユースケースを想定し、ARNに搭載したカメラ映像を陸上局宛のライブストリーミング配信実験を実施した。具体的には、ARNはcefputstreamを用いて放送し、PBSに接続したPCはcefgetstreamを用いて受信した。図22に実証評価の結果を示す。動画配信は問題なかったが、そのストリーミング動画の動きが滑らかではない課題が残った。
ミリ波通信を介した陸対空ノード実験を含めて、地対空統合型ICWSNのテストベッドについて、ジャパンドローン展2025(幕張メッセ)において展示した(図23)。展示デモは会場に設置したミリ波Terragraphにおいて、2ホップの無線リンクを介してICNベースのリアルタイム動画配信を実施した。通信距離は短いが、展示期間中(3日間/10:00–17:00)、システムは安定して連続稼働を続けることが確認できた。
ここで開発したゼロタッチノードについては、福岡県直方市の協力を得て、実際の都市においてミリ波無線伝送実験を実施した。とくに、ミリ波通信においては、現在広く使用されている無線周波数帯と比較すると、雨、酸素、親水性物質(例えば、木、葉、人間)など、ミリ波固有の追加減衰を考慮したリンクバジェットを考える必要がある。とくに、60 GHz帯の電波は雨や酸素の影響を受けやすい点を補足する。関連研究として、屋外で数百メートル程度のカバレージを確保するためにミリ波帯の適用が検討されているが、実際の都市でエコシステムを構築するためにはさらなる評価が必要である。我々の知る限り、実都市におけるミリ波通信を用いた長距離データ伝送に関する実験はほとんど行われていないため、ここでの貢献は大きいと考えている。
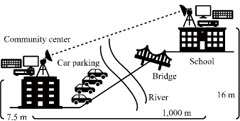
ここでの実験環境について述べる。これまでに実装してきたICWSNノードを、図24に示すように、福岡県直方市内の公民館と小学校に設置した。なお、公民館と小学校は3階建ての建物であり、ノードデバイスは屋上に設置された。国立地理院が提供する三次元地図によると、これの建物の高度はそれぞれ7.5mと16mであり、両者の直線距離は1kmである。図25に示すように、無線伝送リンクには、河川、橋、道路、駐車場があり、電波伝搬に影響を与える可能性があり、詳細は次の通りである。河川は、遠賀川であり、川岸はよく整備され、草や水生植物で覆われている。実験中、川面は平らで穏やかであり、大きな波は立っておらず、すなわち、ミリ波伝搬に影響を与える要因は観察されなかった。河川を渡している橋は勘六橋であり、地方国道に接続している。なお、直方市は、福岡市や北九州市といった大都市近郊都市として発展しているが、その幹線道路の交通量についてはミリ波に影響を与える流量ではない。また、公民館前の河川敷は駐車場として利用されており、数十台の車が駐車されていた。長距離無線伝送実験を実施したフィールド概観として、公民館と学校の風景を図26に示す。図26に示す通り、ICWSNを構成するノードデバイスはミリ波TG通信機材に接続している。
ここで使用した2台のMLTG-CN/LR(パラボラアンテナ内蔵の長距離伝送対応機種)を相互に向かい合わせ、カタログ仕様によると、通信可能な距離は最大1kmであった。実験中は、適応レート制御のインデックスは自動的に9に設定された。図27は公民館に向かって学校屋上のアンテナの背後から撮影した写真であり、公民館は赤印の位置にある。この写真が示す通り、送信側と受信側のノード間の見通しは明確に確保されている。また、実験時の天候は曇りであり、降雨減衰によるミリ波帯の電波伝搬の影響はないと考えられる。
実験シナリオとして、次の2つの場合を想定した。すなわち、アンテナ面を完全に合わせて調整した場合(仰角と方位角の両方が適切に調整した)、およびその状態からわずかに角度をずらした場合場合である。これらのシナリオに設定した場合について、各々、物理層のステータス情報は以下の表にまとめた。なお、MLTG-CN/LRデバイスでは、アンテナの正面空間が仰角と方位角の観点からグリッドパターンに分割され、各サブ領域にビームフォーミングインデックスが割り当てられている。また、アンテナ面で最も中心に近いビーム方向は、ビームフォーミングインデックスが30であることから、双方のアンテナ面の調整結果として、両者のシナリオとなっていることを確認した。
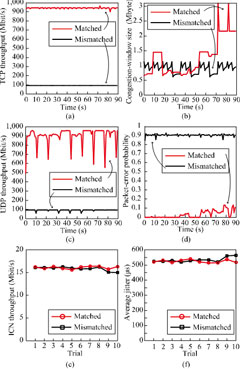
図28にネットワーク特性およびICNの特性評価実験の結果を示す。結果に示す通り、アンテナ面が一致している場合と不一致の場合の平均TCPスループットはそれぞれ941Mbit/sと94.4Mbit/sであった。MLTG-CN/LRに内蔵されたアンテナは指向特性のあるパラボラアンテナであるため、数度のアンテナ面のズレがネットワーク特性の低下を招いた。また、TCP輻輳制御に関して、平均輻輳ウィンドウサイズは1.26Mbyteおよび0.967Mbyte、39.3%の差異が観測された。なお、アンテナ面が一致している場合における結果においては、輻輳ウィンドウサイズを大きくするための試みがなされている結果を得た。
平均UDPスループットはそれぞれ902Mbit/sおよび93.3Mbit/sであった。アンテナ面が一致している場合、UDPスループットが一時的に低下する領域が見られた。この低下の原因は、自動再送信要求と転送エラー制御メカニズムが省略されているためであり、その結果としてこれらの劣化が生じていると考えられる。TCP特性と比較すると、TCP輻輳制御メカニズムが有効に機能しているため、このような劣化は見られない点を補足する。UDP通信におけるパケット誤り率に関して、平均値は、各々、0.0294および0.903であった。アンテナ面が不一致の場合、パケット損失が散在され、これはUDPスループットに影響を与えていることが分かった。ICNスループットの平均値はそれぞれ16.1Mbit/sと15.8Mbit/sであった。
ICNスループットは、Ceforeにボトルネックがあるため、TCPやUDPのスループットよりも大幅に小さくなった。なお、ICWSNでは、ICN層がTCP/UDP層の上にスタックする構成としている。そのため、Ceforeにおけるミドルウェアの実装により、最大データ伝送帯域幅が最大値に設定されると、データ登録、保存、転送の失敗確率が悪化する。さらに、平均ジッターはそれぞれ525μsと534μsであった。ただし、ICNスループットとジッターは、2つのシナリオ間で有意な差は見られなかった。これらの結果から、ICN層プロトコルの性能がTCP/UDP/IPプロトコルスタックの性能に影響を与えないことがわかった。また、実際の都市において、ミリ波を用いたICWSNに十分なネットワーク性能が得られることも実験的に検証することができた。
Ⅳ.E. 研究開発項目2-d-ⅴ)ICWSNの高信頼化に関する実証評価(㋿6年度)
研究開発項目2-d-ⅰ)からⅳ)で実現したデバイスおよび実装開発のノウハウを結集し、高信頼ICWSNシステムの基礎設計に基づき、高信頼ゼロタッチセンサノードの実装開発ならびにKOIL Mobility Fieldおよび福岡大学近郊エリアの2ヵ所にて運用を行い提案手法の有効性評価を実験的に実施する。ここでは、研究開発項目2-d-ⅲ)で確立させた要素技術に対し、研究開発項目2-d-ⅰ)で行ったテストベッド開発のノウハウを活かし、高信頼ゼロタッチセンサノードの実装開発、ならびにKOIL Mobility Fieldおよび福岡大学近郊エリアの2ヵ所にて運用を行い提案手法の実験的な有効性評価を実施した。
研究開発項目2-d-ⅲ)において、提案ICWSNにおける高信頼性とゼロタッチ設計を実現させるために、マイクロオペレーター(micro operator; μO)とマイクロサービスプロバイダー(micro service provider; μSP)を用いる手法を検討した。uOはSNがICWSNに参加可能か検証し、その結果として接続に必要となる情報を提供する。そのため、認証情報だけではなく、ネットワーク構築設定情報(最寄のRN、PBS、FIB(forwarding information base)情報)の授受が必要である。一方、μSPはSNがICWSNとの接続が確立された後、ゼロタッチ動作するために必要なアプリケーションや設定情報を提供する。また、無線ネットワーク分野に信頼性工学の知見を導入することにより、提案手法の可用性について定式化し机上検討により評価した。研究開発項目2-d-ⅲ)においては、机上設計・机上検討を実施し完了しているが、実々装することを考えると不十分な箇所が散在される。この点に関しては、今後の課題として継続的して研究を進める必要性があるが、その第一段階として、それを評価するための試作ノード開発および基礎評価が必要である。
ゼロタッチノードの実装開発に関しては、研究開発項目2-d-ⅰ)からⅳ)を通じて、実証フィールドにおいて各種実験を実施するために、各種センサや周辺機器等をアタッシュケースに収めた可搬型ノードデバイスを開発した。また、陸上・上空で利用可能なノードおよび現地設置ノードデバイスを開発した。これらの知見やノウハウ、実証実験結果を結集して、高信頼ゼロタッチ型センサノードを開発した。当該ノードは、過酷な屋外環境に設置されることを想定した防水設計である(デバイス内外は防水コネクタを採用)。また、システムの信頼性を向上させるため、モーター駆動システムや空冷ファンなどの機械的構造は非搭載である。センサや各種モジュールはケース外にも搭載できるように設計しており、それらのインタフェースは産業界におけるデファクトスタンダードであるRS-232/485(Modbus)に基づくシリアル接続を標準としているため、互換性と拡張性を備えた汎用設計としている。本デバイスはゼロタッチ設計を採用しているため、商用電源に接続後、電源ボタンを押すだけで動作するように事前に設定等を組み入れている。当該ゼロタッチノードデバイスは、CEATEC 2024において試作機の参考展示を行った(図29)。
ここで開発したゼロタッチノードデバイスにおいては、ICNベースのデータ伝送制御を行う必要があり、それを達成するに十分なスペックが求められることが指摘されている。その点について検証するために、スマートシティアプリケーションにおけるセンシングデータの統計的特性に基づきモデル化を行い、定式化されたモデルを使用して生成したランダムデータに対し、ICWSNの構成ノードとして想定した制御コンピュータの計算処理能力を評価した。
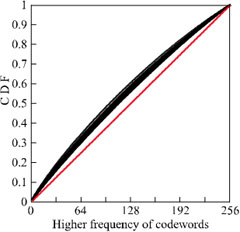
センシングデータの統計モデルは、先行研究で開発した災害に強いスマートシティの実現に向けた河川監視システムで取得したセンシングデータを用いて作成した。台風や集中豪雨による内水氾濫を防止するために、河川監視システムにおいて河川の流速と方向を推定することを目的として、遠賀川(福岡県直方市)に試験的に設置した。そのうえで、センシングデータとして、水面と周辺風景の写真を撮影した画像データである。ここでの統計モデル化を行うにあたり、位置、カメラアングル、撮影時間などの条件は同じであるが、撮影時間を変えた20枚の画像を含む25組のデータセットである。具体的な作成手順としては、データセットからバイト単位のコードワード(0x00~0xFF)の累積分布関数(cumulative distribution function; CDF)を表すセンシングデータの統計モデルを導き出した。
各データについて256種類の異なるコードワードの出現頻度を算出し、出現確率を降順にソートした。図30に計算されたCDFを重ね合わせた線として描画した結果を示している。なお、赤い線は符号語が均等に発生した場合を表している。この結果から、符号語が均等に分布している場合は線が赤い線と重なるはずであるが、現場のフィールドで取得されたセンシングデータには特定の偏りがあることが示されている。取得条件は様々であるが、データの統計的特性は類似しているため、以下で述べるハードウェア性能評価に用いるランダムデータの生成は、この統計モデルを用いた。
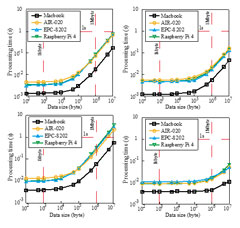
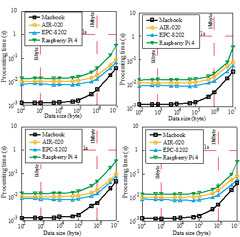
ICWSNにおいてはセンシングデータがカプセル化された名前付きデータとして取り扱われるため、効率性と信頼性を確保するために、基本的なデータ演算操作としてデータ圧縮および暗号化が実行される。そこで、提案ICWSNのエッジ側のノードとして、ユーザ端末ノード、エッジノード、SNとして想定したハードウェアデバイスに対し、計算機演算能力という観点で評価した。この評価結果は、スマートシティにネットワークを構築し、展開するためのベンチマークと実現可能な条件を提供できる点において貢献する。ハードウェアについては、ユーザー端末ノードとしてMacBook Pro、エッジノードとしてAdvantech AIR-020、センサノードとしてAdvantech EPC-S202とRaspberry Pi 4Bを用いた。とくに、Advantech AIR-020とEPC-S202は、いずれも産業用途向けの高信頼の組込みコンピュータである。コンピュータの演算能力評価に際して、先述のモデルに従い生成した、0.1、0.5、1、5、10、50、100、500、1,000、5,000、10,000kbyteの100個のランダムなデータセットを用意した。データセットのバリエーションとして、最小および最大サイズは、ICNヘッダー(およびフッター)と典型的なICNチャンクサイズを持つテキストベースのセンシングデータを想定して設定した。また、このような手続きでデータ生成を行うことは、著作権や肖像権に関する問題に懸念が残る実データの使用を避けるためである。
評価実験として、データ圧縮および伸長処理にかかる処理時間を測定した。具体的には、データ圧縮アルゴリズムとして、deflateアルゴリズムとLempel-Ziv-Markov-Chainアルゴリズム(LZMA)を使用した。deflate方式はスライディング辞書とハフマン符号化技術を使用したもので、データ圧縮方式として広く使用されている。一方、LZMA方式は、圧縮性能を向上させるために、様々な符号化技術で強化された効率性の高いデータ圧縮方式のひとつである。いずれも可逆データ圧縮方式であり、複数の組み込みデバイスでサポートされている。一般的に、LZMA方式は、deflate方式よりも高速に処理することが可能である。また、データ暗号化方式として、さまざまなコンピュータシステムで広く利用される共通鍵暗号方式である、AES方式を使用した。一般に、AESベースの暗号化方式を採用したシステムでは、128bit、192bit、256bitなどの鍵長を選択するが、鍵長が長いほど暗号強度が強固になる。ここでは、128bitと256bitが、一般的なIoTデバイスで広く使用されていることから選択した。実験では、HTTP over TLS/SSLプロトコルなどのインターネットサーバー上で安全な通信を提供するオープンソースソフトウェアライブラリであるOpenSSLを使用した。
図31–32において、データ圧縮に関して、deflateとLZMAの各方式による処理時間を含めた結果、データ暗号化に関して、128bitと256bitのAES方式を使用した暗号化と復号の処理時間を含む結果を示している。縦軸、横軸とも対数軸である。データサイズが100kbyte以下の領域では、データ圧縮・伸長処理時間はほぼ同じであり、deflate、LZMAいずれの方式も100kbyteまではデバイスに関係なく10ms以下で処理されている。これはデータ(圧縮)に必要な最小限の処理遅延を示しており、メソッドの初期化や終了などの処理オーバーヘッドを含み、不可避なものである。100kbyte以上のデータ領域では、処理時間はデータサイズに比例して増加した。一方、データの暗号化処理時間は、データの圧縮処理時間と同じ傾向を示している。ただし、MacBookは他のデバイスよりも高い性能を示した。AIR-020はJetsonプラットフォームを搭載しているが、データ圧縮や暗号化のような汎用処理では、AI最適化メカニズムが有効に機能しなかった。MacBookは、強力なエンドユーザープロセッサを搭載しているため、テスト対象のデバイスの中で最高のパフォーマンスを発揮した。一方、エッジ側のWSNデバイスは屋外での使用を考慮する必要があり、放熱や安定性の問題から、処理遅延は約100msと妥協したスペックになっている。
図31–32の結果に対しスマートシティアプリケーションにおけるICWSNの展開に与える影響について考察する。エッジ側ノードデバイスの処理遅延時間が約100ms以下であることが分かった。すなわち、この結果として、遅延が大きな問題とならないアプリケーションサービス、遅延に敏感でないアプリケーションサービス、例えば、データ収集間隔が1時間(または1日)のものについては問題にならない。災害に強いスマートシティアプリケーションのための河川監視システムでは、通常気象条件下では1時間ごとのセンシングデータが必要であるが、災害が発生した場合はこの間隔が20分以下に短縮される可能性があるが問題にならない。
キャッシングデータの無線伝送を実現するために、別のアプローチを試みた。ICWSNのネットワーク層は、無線通信(有線ネットワークとは異なり)と同じブロードキャストベースのデータ転送である。これは、ICWSNが無線通信と適した組み合わせであることを意味しているが、ブロードキャストベースの無線伝送においては、電波のオーバヒアリング現象にさらされる。この欠点を利点に変えるため、建設的干渉とネットワーク符号(network coding; NC)技術に基づく協力通信を検討した実績がある。当該手法においては、データ送信後にアシストフェーズを設け、送信元ノード周辺の協力ノードが、ダイバーシチ利得を得るために余分なデータを送信している。ここでは、階層変調技術を活用することでアシストフェーズを排除することを目指し、新たなデータキャッシングを指示する無線伝送方式の初期検討を行った。
無線通信システムにおいて、柔軟なデータレートを実現するために、一般的に、異なる変調方式とエラー訂正符号化方式を組み合わせた設計としている。また、無線デジタルテレビ放送システムにおいては、階層変調技術を用いて複数の情報ビットを重ね合わせることで、固定データレートの受信デバイスとの下位互換性を保ちつつ、ある程度の柔軟性を実現させている。ICWSNとテレビ放送システムは、ブロードキャストベースである点が共通していることに注目し、また階層変調技術の概念を拡張して2つの異なる情報源を統合できる方式が開発されている。ここでは、この発想に着想を得て、アシストフェーズにおける余計なデータ伝送を排除することを図った。初期検討としては、階層変調技術に基づく協調通信方式の青写真を示し、予備評価として基礎特性を評価した。
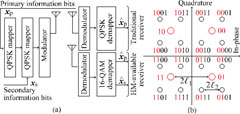
階層変調技術を用いた無線通信システムにおいては、図33に示すように複数の多様な情報を一次情報と二次情報に分類して重ね合わせる。提案手法においては、オリジナルデータを一次情報、協力ノードの通信に必要なデータを二次情報に割り当てる。これらの情報信号は、デジタル無線通信で一般的に使用される、QPSK方式利用して変調のうえ重畳させることにより、16-QAM方式と類似した信号を生成可能である。提案手法で用いる階層型QPSK/16-QAM方式は、情報のマッピングルールが通常とは異なり、一次情報は16-QAMの上位2ビットに、二次情報は下位2ビットに割り当てる。これにより、受信側ノードにおいては、階層変調技術に対応しているノードは、一次情報および二次情報を分離することが可能である。一方、階層変調技術に対応していないノードにおいては、QPSK方式に従い一次情報を復元することが可能であるため互換性を維持している。
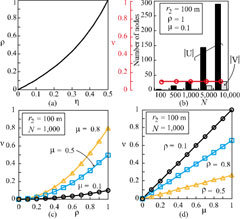
提案手法の基礎評価として、計算機シミュレーション評価を行った結果を図34に示す。図34(a)は受信可能な一次情報と二次情報のカバレッジ範囲の比率を、階層変調技術技術の主要パラメータに対して示している。(b)に示すように、提案手法における協力ノードは、全体のノード数の増加に伴って増大するが、通信範囲内のノードに対する比率は一定であった。(c)は、階層変調技術に対応しており、それが利用可能なノードが一定の割合で共存する場合、二次関数的に協力ノード数が増大することを示している。一方、(d)は、いくつかの変動要因の下では、それが一次関数的に増加することを示している。これらの初期シミュレーションの結果は、提案された方式が効果的に機能する条件を明確にする必要があることを示しており、これは今後の継続的似研究をすすめ、その結果に基づくシステム設計を行う必要がある。
Ⅳ.F. 研究開発項目3-b-①-ⅰ)プロトタイプ:3Dセンサシステム(基礎設計)(㋿4年度)
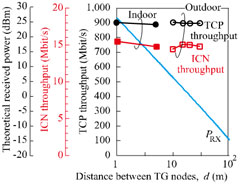
産業用の組込みコンピュータとして実績のあるアドバンテック株式会社のMIC-710AIXをベースとした試作機を実装してきた。研究開発項目2-d-ⅰ)において、可搬タイプノードの実装開発をすすめてきた。プロトタイプネットワーク環境の構築および基礎評価の実施に関して、研究開発項目2-d-ⅰ)で実装したテストデバイスを用いて、ICWSNにおけるミリ波の応用可能性について基礎評価を行った。具体的には、ユーザ端末とセンサノードの1対1通信を想定し、ユーザ端末はMacBookとTerragraph親機、センサノードは研究開発項目2-d-ⅰ)の試作デバイスとTerragraph子機を各々組み合わせた。計測項目として、iPerf3によるTCPスループット、ICNプラットフォームであるCefore上のICNスループットも併せて測定した。ICNスループットの計測に関しては、スタートアップミーティングの際にいただいた、アプリケーションレベルでの検証についても実施するべきというコメントを受けて実施した。基礎評価を通じて、ミリ波の伝搬特性は距離減衰よりも降雨、樹木・葉、無線伝送リンクを遮る人の影響を大きく受け、実験中に人が横切るだけでスループットが最大50%程度に低減することを確認した。また、3Dセンシングデータを無線伝送するために十分なスループットが得られることも分かった(図35–37)。
ここでの計測実験において、Terragraphの送受信器間の伝送リンクの水平面を考慮することなく計測した場合、10%程度のスループット低下が見られた。Terragraphにおいてはビームフォーミング技術の働きにより水平面に対するアンテナの方向調整は許容されると考えていたが、その仰角によるスループット低下の影響について調査する必要があることが明らかになった。なお、先述の基礎評価においては、レーザ測距計を用いて、アンテナ間の距離と水平面を一致させて実験を行っている。以上を考慮したうえで、電波暗室(反射波の影響を排除された環境)において、仰角を変化させることによるスループット低下の影響を評価した。具体的には、Terragraphの親機と子機の疎通確認、スループット計測、Ceforeを用いたコンテンツ送受信テストを実施した。このとき、Terragraphの親機・子機のアンテナ角度を0°–15°まで5°ごとに変化させたときのスループットを計測した結果期待される試験結果が得られた(図38)。上空ノードやスマートシティでの展開を考えるとき、さらなるビームフォーミングの性能を評価する必要があることも分かった。
Ⅳ.G. 研究開発項目3-b-①-ⅱ)プロトタイプ:3Dセンサシステム(テスト運用)(㋿5年度)
実フィールドにおいてプロトタイプネットワークを構築のうえテスト運用実施する。研究開発項目2-d-ⅱ)と連携し、KOIL Mobility Fieldだけではなく、福岡大学近郊地においてその一部の機能を再現させることにより、多面的な運用評価ができるようにした。実フィールドにおいてプロトタイプネットワークを構築のうえ、地対空統合ICWSN環境でのネットワーク特性について評価した。ここでの実験は野球場のテストフィールドで実施し、図39に示すような上空ノード(ARN)装置を実装した。ARNデバイスは、カスタマイズされたBUDデバイス、カメラ、および2つのTerragraphデバイスから構成され、産業用無人航空機(UAV)に搭載した。TerragraphはPBSとSNとの通信に使用され、TerragraphのペアはPBSとARN間を接続し、もう1つはARNとSN間を接続するために使用している。したがって、アンテナは水平面と地上面を向けた。
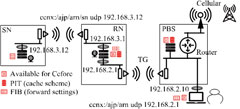
実験ネットワークは図40に示す構成として、ユーザ端末として、PBSに直接接続したPCを使用し、PCとBUDデバイスにICNプラットフォームのCeforeをインストールし、ユーザ端末からSNへのデータ転送が適切に行われるようにFIBを設定した。すなわち、SN–RNとRN–PBSにそれぞれ異なるサブネットマスクのネットワークを割り当て、PBSからARN経由でSNに中継する際の名前とアドレスのマッピングルールとしてFIBテーブルを設定した。ARNはRAM上にキャッシュ機能を持ち、同じデータの別の要求に対して応答することができる。
Ⅳ.H. 研究開発項目3-b-①-ⅲ)プロトタイプ:3Dセンサシステム(横展開を含めた実証実験)(㋿6年度)
㋿5年度に実施し継続中のテスト運用を踏襲し、他機関との連携や横展開を見据えた実証評価を実施した。ここでは、地対空統合ICWSNの実証実験として、マルチホップ(今回の実験では3ホップ)環境下での無線通信リンクの信頼性(安定性)について検証することを目的とする。本検証を実施するためには、複数の上空ノードを用意する必要があるため、芝浦工業大学が保有するスマートポールを用いた上空ノードを模擬することが可能な環境を用いて評価した。図41に実験ネットワークの構成を示す。KOIL Mobility Fieldに敷設されたTerragraph親機の直下にユーザ端末を想定したコンピュータを接続した。SNは研究開発項目2-d-ⅴ)で実装開発したゼロタッチノードデバイスを使用して、無線インタフェースとしてTerragraph子機を接続した。上空ノードによる中継ノードとして、スマートポールにはTerragraph子機を2台搭載したうえで2組準備して、Terragraph親機とゼロタッチノードデバイスのリンクおよび上空ノード間のリンク、合計で3ホップ構成とした実証実験ネットワークを構築した。各々の機材に対し、同一ネットワークとなるように固定IPを割り当てた。
KOIL Mobility Fieldでの実験ネットワークの構築に関して、図42–43に示すような2つのシナリオを想定した。すなわち、すべてのノードを直線的に配置する場合および無線リンクを垂直に折り曲げた場合である。これら2つのシナリオに対し、基本的なネットワーク特性を計測した。図44–45に実験風景を示す通り、上空ノードを模擬したスマートポールの設置およびセンサノードの設置について示す。iPerf3を用いたTCPスループット特性を計測した結果、今回採用したTerragraphの上限である1Gbit/sに相当するスループットを得ることを確認した。この結果を踏まえて、上空ノードを介してマルチホップ環境下でのミリ波無線通信の安定的な伝送が実現可能であることが示された。
Ⅴ. おわりに
本研究開発項目では、自己成長するデジタルツインを構築する技術として、情報指向型ネットワークを導入した無線センサネットワーク(information-centric wireless sensor network; ICWSN)において、高信頼性データキャッシュ技術を開発した。
謝 辞
This work was partly supported by NICT Japan, Grant Number JPJ012368C05601. We are grateful to Dr. Kenji Kanai and Dr. Taku Yamazaki for their helpful discussions, and to Nogata City, Advantech Japan, BeMap, Haft, Panasonic, and TEAD for their help with the experiments.
研究成果
- 金井謙治, 山崎託, 宮田純子, 金光永煥, 峯荒夢, 森慎太郎, 中里秀則, “City as a Serviceを支えるデジタルツインを持続可能な状態で自己成長させるエコシステム,” 電子情報通信学会 コミュニケーションシステム(CS)研究会 技術報告, vol. 122, no. 269, pp. 1–6, 名古屋, Nov. 2022.
- Shintaro Mori, “A preliminary evaluation of millimeter-wave communications for information-centric wireless sensor networks,” Proc. 2023 RISP International Workshop on Nonlinear Circuits, Communications, and Signal Processing (NCSP 2023), p. 130, Honolulu, USA, Feb.–Mar. 2023.
- Shintaro Mori, “Information-centric wireless sensor networks for smart-city-as-a service: Concept proposal, testbed development, and fundamental evaluation,” Proc. IEEE Consumer Communications & Networking Conference (CCNC 2023), pp. 945–946, Las Vegas, USA, Jan. 2023, doi: 10.1109/CCNC51644.2023.10060577. (Xplore, Digital library)
- 森慎太郎, “(チュートリアル)グリーン情報指向無線センサネットワーク実現のための高効率・省電力化に関する一検討,” 電子情報通信学会 総合大会 2023, 埼玉, Mar. 2023.
- Shintaro Mori, “A study on zero-touch-design information-centric wireless sensor networks,” Proc. IARIA the 22th International Conference on Networks (ICN 2023), pp. 7–9, Venice, Italy, Apr. 2023. (Best paper award) (Thinkmind, Digital library)
- 金井謙治, 中里秀則, 山崎託, 宮田純子, 金光永煥, 峯荒夢, 森慎太郎, 今村博宣, “(依頼講演)D2EcoSys:共創型デジタルツインの実現に向けて,” 電子情報通信学会 コミュニケーションシステム(CS)研究会 技術報告, vol. 123, no. 32, p.26, 高松, May 2023.
- 森慎太郎, “(依頼講演)情報指向無線センサネットワークに関する一検討,” 電子情報通信学会 コミュニケーションシステム(CS)研究会 技術報告, vol. 123, no. 32, p. 33, 高松, May 2023.
- 森慎太郎, “高信頼情報指向無線センサネットワーク構築に向けた初期検討:プロトタイプネットワーク構築およびテストベッド開発,” 電子情報通信学会 情報指向ネットワーク技術(ICN)特別研究専門委員会, 福岡, Aug. 2023. (Slide decks)
- Shintaro Mori, “Energy-efficient cooperative caching scheme for green ICWSN: Preliminary analysis and testbed development,” Proc. ACM the 29th Annual International Conference on Mobile Computing And Networking (MobiCom 2023) WS Networked Sensing Systems for a Sustainable Society (NET4us), pp. 207–212, Madrid, Spain, Oct. 2023, doi: 10.1145/3615991.3616406. (ACM, Digital library)
- K. Kanai, H. Kanemitsu, T. Yamazaki, S. Mori, A. Mine, S. Miyata, H. Imamura, and H. Nakazato, “(Invited) D2EcoSys: Decentralized digital twin ecosystem empower co-creation city-level digital twins,” IEICE Transaction on Communications, vol. E107-B, no. 1, pp. 50–62, Jan. 2024, doi: 10.1587/transcom.2023WWI0001. (J-Stage, Digital library)
- Shintaro Mori, “Zero-touch-design information-centric wireless sensor networking with availability assurance,” International Journal on Advances in Networks and Services, vol. 16, no. 3&4, pp. 63–74, Dec. 2023. (ThinkMind, Digital library)
- Shintaro Mori, “Information-centric wireless sensor networking platform for decentralized and co-creative digital twin eco-system,” Proc. 2024 RISP International Workshop on Nonlinear Circuits, Communications, and Signal Processing (NCSP 2024), pp. 348–351, Honolulu, USA, Feb.–Mar. 2024.
- Shintaro Mori, “Test-field development for ICWSNs and preliminary evaluation for mmWave-band wireless communications,” Proc. IEEE Consumer Communications & Networking Conference (CCNC 2024), pp. 1–2, Las Vegas, USA, Jan. 2024, doi: 10.1109/CCNC51664.2024.10454799. (Xplore, Digital library)
- 森慎太郎, “ミリ波帯地対空情報指向無線ネットワークを用いた鳥瞰映像伝送に関する一検討,” 電子情報通信学会 情報指向ネットワーク技術(ICN)特別研究専門委員会, 伊勢, May 2024.[Slide decks]
- Shintaro Mori, “MmWave UAV-assisted information-centric wireless sensor network for disaster-resilient smart cities: Preliminary evaluation and demonstration,” Proc. IARIA the 23th International Conference on Networks (ICN 2024), pp. 1–4, Barcelona, Spain, May 2024. (Best paper award) (Thinkmind, Digital library)
- 森慎太郎, “(依頼講演)情報指向無線センサネットワークにおける高信頼性ゼロタッチノードの試作とその応用に関する一検討,” 電子情報通信学会 コミュニケーションシステム(CS)研究会 技術報告, vol. 124, no. 234, pp.20–25, 大阪, Nov. 2024.
- Shintaro Mori, “(Invited)A study on information-centric wireless sensor network framework for smart-city deployment,” IEICE SeMI Vietnam Workshop, Da Nang, Vietnam, Oct. 2024.[Press]
- Shintaro Mori, “Development of UAV-aided information-centric wireless sensor network platform in mmWaves for smart-city deployment,” International Journal on Advances in Networks and Services, vol. 17, no. 3&4, pp. 105–115, Dec. 2024. (ThinkMind, Digital library)
- Shintaro Mori, “Fundamental analysis of cooperative communication scheme using hierarchical modulation for information-centric wireless sensor networks,” Proc. IEEE Consumer Communications & Networking Conference (CCNC 2025), pp. XX–XX, Las Vegas, USA, Jan. 2025, doi: XXX. (Xplore, Digital library) (Accepted)